The Rodenborn lab investigates fluid systems using scaled laboratory experiments to understand fundamental phenomena that apply to a variety of geophysical and biological systems. His undergraduate research teams are currently studying three such fluid systems.
Robophysics of bacterial swimming
There is intense interest in engineering robots that can move effectively through a wide range of natural environments. However, the success of robots based on natural organisms (biomimetic robots) is comparatively limited. We do not have a full understanding of the interaction between controlling these robots and complex environments where we would like them to move. Consider designing a robot to search for earthquake victims or moving a rover on a distant planet.
The methods of physics as applied to these problems is known as robophysics and it can aid engineers in designing and building robots. For example, researchers are exploring the use of nano-scale robots for drug delivery and other biomedical purposes, often modeled on the swimming of bacteria and other microorganisms. Fluid dynamics at these length scales (low Reynolds number) is radically different from macroscopic fluid dynamics. The motion of microscopic objects is dominated by viscous damping; inertia plays no role so there is no coasting. In contrast, motion at high Reynolds number is inertia dominated and viscous effects are secondary. We swim by pushing fluid behind us in order to move forward, but a microorganism is not able to swim in the same way.

There have been attempts by physicists and biologists to provide simplified models of swimming microorganisms. Early work by G.I. Taylor showed that microorganisms use fluid drag to propel themselves, which may not seem to make sense. How can resistance be used for propulsion? However, we are able to walk only because the floor has friction. For example, fluid drag (per unit length) in the direction perpendicular to a thin rod is much higher than the drag parallel to a rod. Organisms take advantage of this drag anisotropy to move by using different types of wavelike motion. For example, spermatozoa have a whip-like tail that beats in a sinusoidal fashion.
After G.I. Taylor, several approximate theories were developed to describe swimming microorganisms. These approximations made sense when conducting numerical simulations and making experimental measurements were much more difficult.
However, my research has shown that drag-based theories of swimming using a helical flagellum introduce large errors (~100%) when compared with experiments. I used macroscopic robots in properly scaled fluid environments to circumvent the experimental complexities of measuring the performance of bacteria or nano-scale devices. I was able to achieve precise control simultaneous with precise measurement of forces and showed how poorly resistive force theory compared with experiments and simulations.
My lab is now focused on understanding the effects of nearby boundaries on swimming with a helical flagellum. We use a robotic swimmer and precisely position the swimmer with respect to the wall of the tank. Our robot does not swim in water, but instead, swims in highly viscous silicone oil that is 100,000 times more viscous than water. We must scale the fluid’s viscosity in order to offset for having scaled the bacterium from about one micron to about a 10 centimeter robot. This type of scaled fluid experiment using robotic swimmers is one area of research in my lab.
Calibrating Numerical Simulations with Macroscopic Bacterial Models
Our collaborators at Trinity University in San Antonio, Texas are able to complete simulations that model our experiments at a microscopic scale, and ultimately, our experimental work will allow our collaborators to calibrate their numerical simulations in an effort to reduce the errors of the simulations. By performing experiments to gather force and torque information about an axis parallel and perpendicular to a selected boundary, we should be able to calculate to forces and torques present on a sphere at any given boundary distance (even including multiple boundaries). A sphere is used to model a bacterial body, but we also performed torque measurements with a rotating cylinder to model more cylindrical bacterial bodies too. Again, all of this work is completed in an effort to better understand the fundamentals of bacterial swimming.
Rotational motion about an axis parallel to a set boundary
Our lab group has been collecting data for torque as a function of boundary distance for cylinders and spheres near a smooth, flat boundary. In doing so, we will be able to better understand the torque acting on bacterial bodies at a certain distance from a boundary.
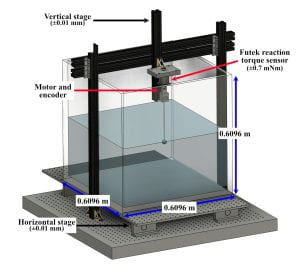
We rotate spheres and cylinders in a tank of high viscosity silicone oil to mimic the conditions of a low Reynold’s number environment. A torque sensor is also connected to the sphere and/or cylinder as it is rotated. The tank sits on a horizontal translational stage, so we are able to move the axis of rotation to any given distance from the boundary. We selected boundary distances based off of a logistic growth function and collected torque measurements for both counterclockwise and clockwise rotation at each location. We have completed the work with cylinders and spheres rotating about an axis parallel to the boundary and have started work with spheres rotating about an axis perpendicular to the boundary.
Recently, we have upgraded to a larger tank to minimize the effects of multiple boundaries.

Results for cylinder rotating around an axis parallel to a boundary
Experiments confirm Jeffrey and Onishi (1981) theory, and experiment results were used to calibrate numerical simulations.
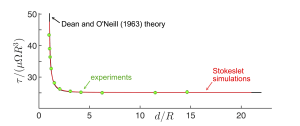
Results for sphere rotating around an axis parallel to a boundary
Experiments confirm Dean and O’Neil (1963) theory, and experiment results were used to calibrate numerical simulations.
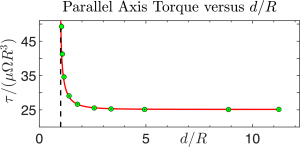 Additional results for sphere rotating around an axis parallel to a boundary
Additional results for sphere rotating around an axis parallel to a boundary
Additional experiments confirm Dean and O’Neil (1963) theory, and experiment results were used to calibrate numerical simulations.
Translational motion perpendicular to a boundary condition

Translational motion perpendicular to a boundary condition
Lee and Leal (1980) predicts the forces present on a sphere at certain boundary distances. It predicts that force on a sphere increases as the sphere approaches a boundary. Our lab group has been testing this theory in high viscosity silicone oil to model bacterial swimming. Ultimately, we will send our data to our collaborators so that they can calibrate their numerical models.
To perform these measurements, we dropped a small metal sphere at the center of the tank of silicone oil. We videoed the sphere as it fell towards the bottom boundary, and we then used Tracker collect time and position data from our videos. Once we had the data, we uploaded it to MATLAB where we plotted the data while also taking mass of the sphere, viscosity of the fluid, and temperature of the fluid into account. Our plot allows us to compare our measured values to theoretical values at the measured boundary distances.
The red line represents theory, and the blue points represent our collected data. Experiments confirm Lee and Leal (1980) theory, and experiment results will be used to calibrate numerical simulations.
![]()
Results for sphere falling towards perpendicular boundary
Experiments confirm the Lee and Leal (1980) theory, and experiment results will be used to calibrate numerical simulations.
Future Experiments
- Translational motion parallel to a boundary wall
- Perform similar experiments to all those listed above with a rough boundary condition
- Collect force and torque data on a full macroscopic bacteria model sedimenting